Traslazione e rotazione
Traslazione di un solido
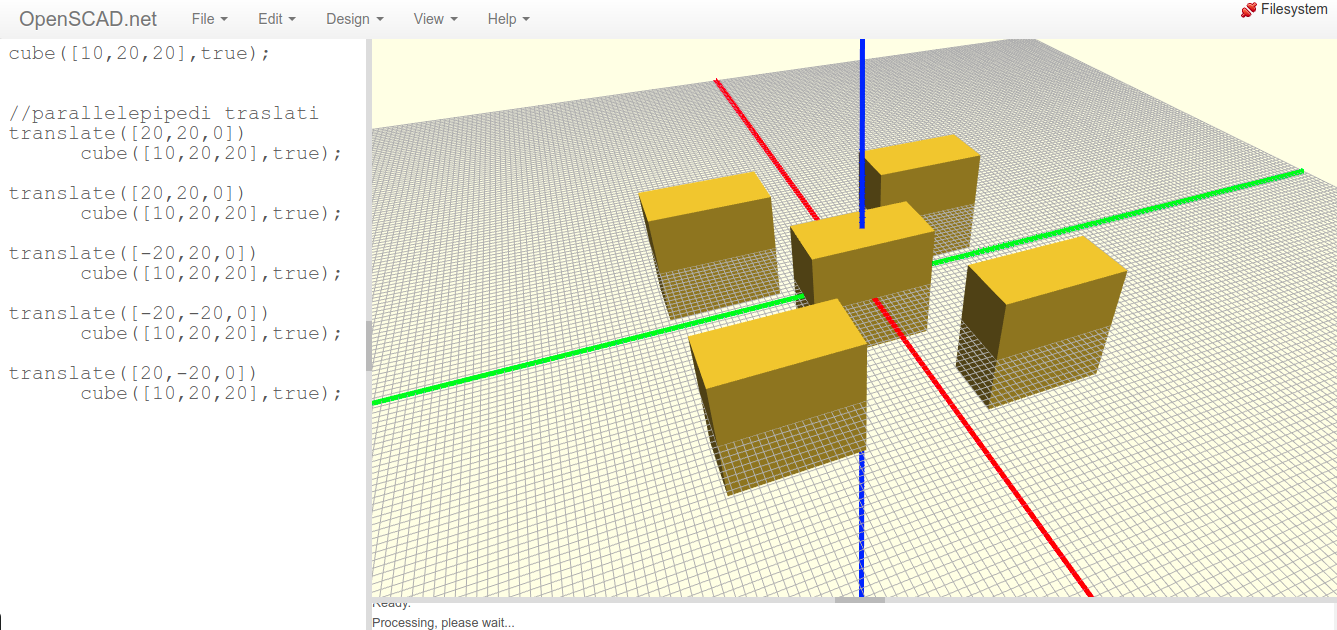
La traslazione avviene anteponendo il comando translate[x,y,z] al solido da ruotare. La lista di valori racchiusi tra parentesi quadre rappresentano le quantità di traslazione lungo i tre assi rispettivamente.
cube([10,20,20],true);
//parallelepipedi traslati
translate([20,20,0])
cube([10,20,20],true);
translate([20,20,0])
cube([10,20,20],true);
translate([-20,20,0])
cube([10,20,20],true);
translate([-20,-20,0])
cube([10,20,20],true);
translate([20,-20,0])
cube([10,20,20],true);
Rotazione di un solido
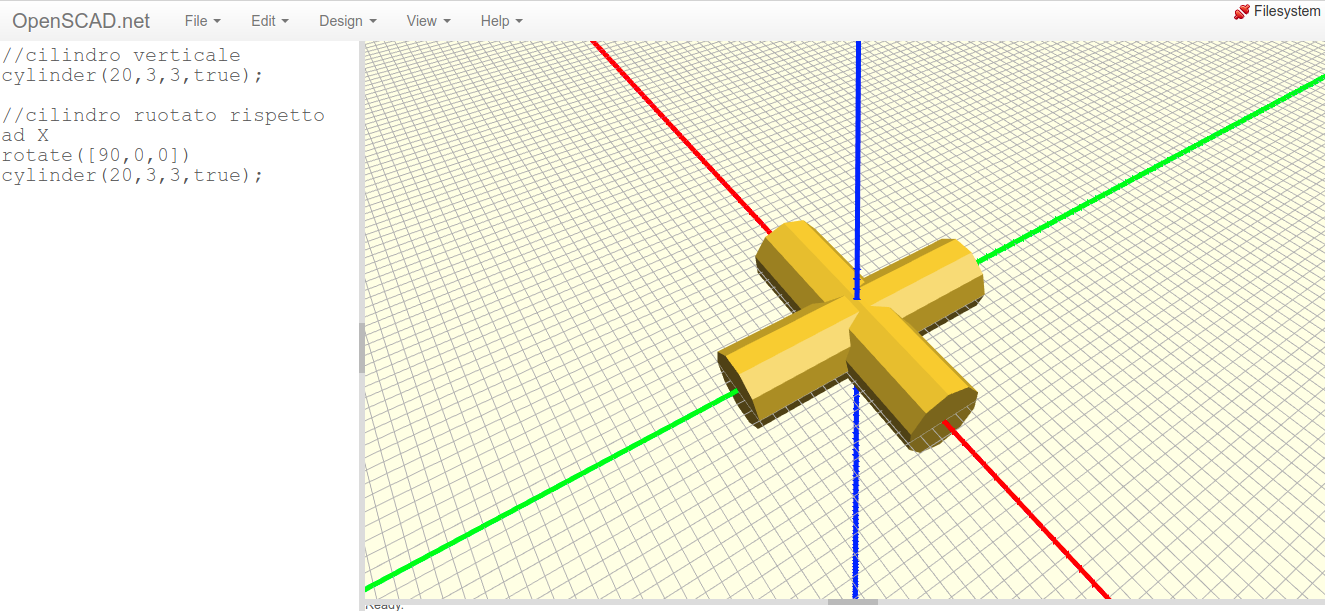
La rotazione avviene anteponendo il comando rotate[x,y,z] al solido da ruotare. La lista di valori racchiusi tra parentesi quadre rappresentano le quantità di rotazione in gradi lungo i tre assi rispettivamente.
Rotazione intorno ad X:
//cilindro verticale
cylinder(20,3,3,true);
//cilindro ruotato rispetto ad X
rotate([90,0,0])
cylinder(20,3,3,true);
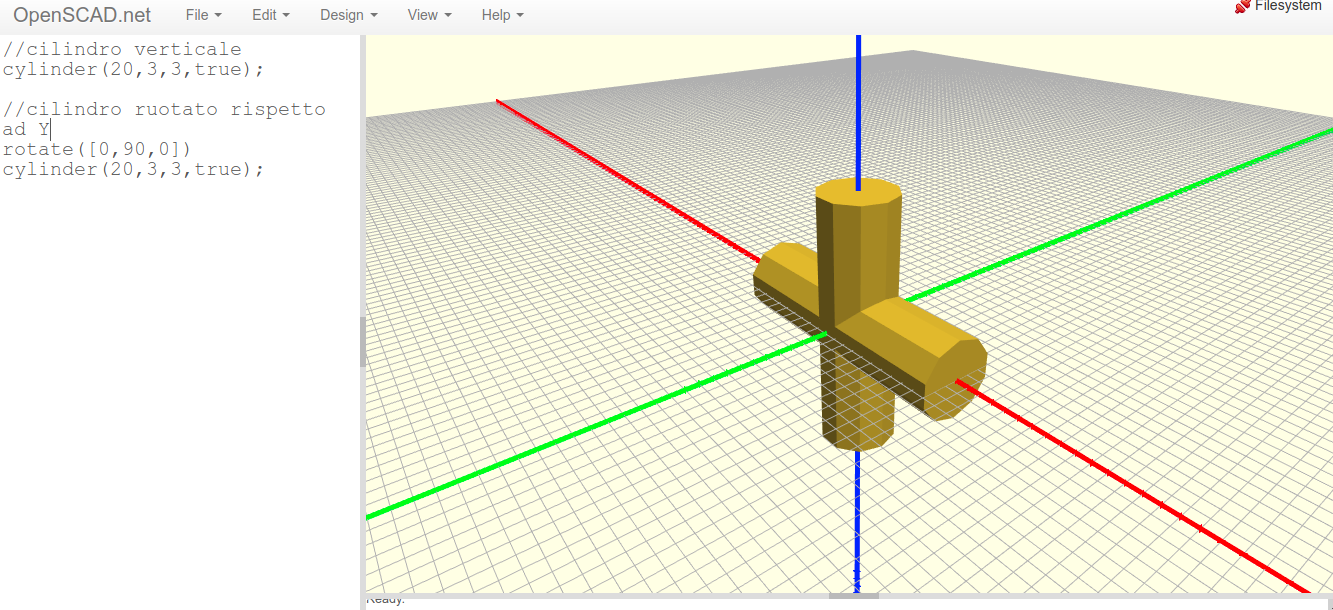
Rotazione intorno ad Y:
//cilindro verticale
cylinder(20,3,3,true);
//cilindro ruotato rispetto ad X
rotate([0,90,0])
cylinder(20,3,3,true);
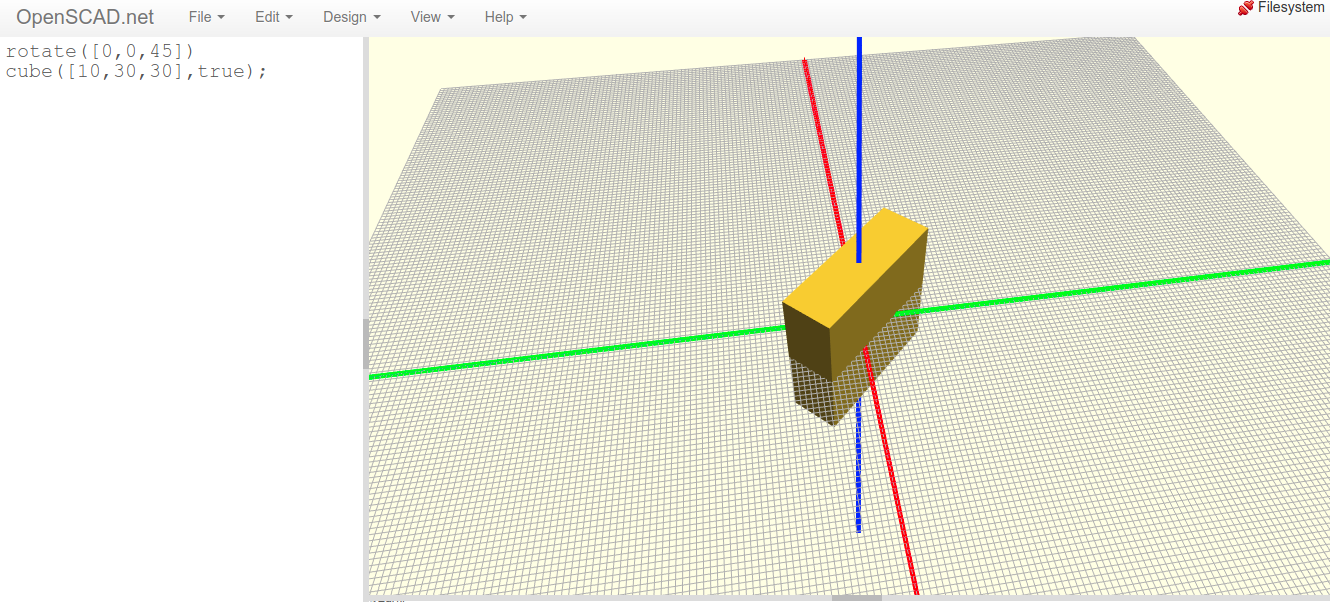
Rotazione intorno a Z:
rotate([0,0,45])
cube([10,30,30],true);
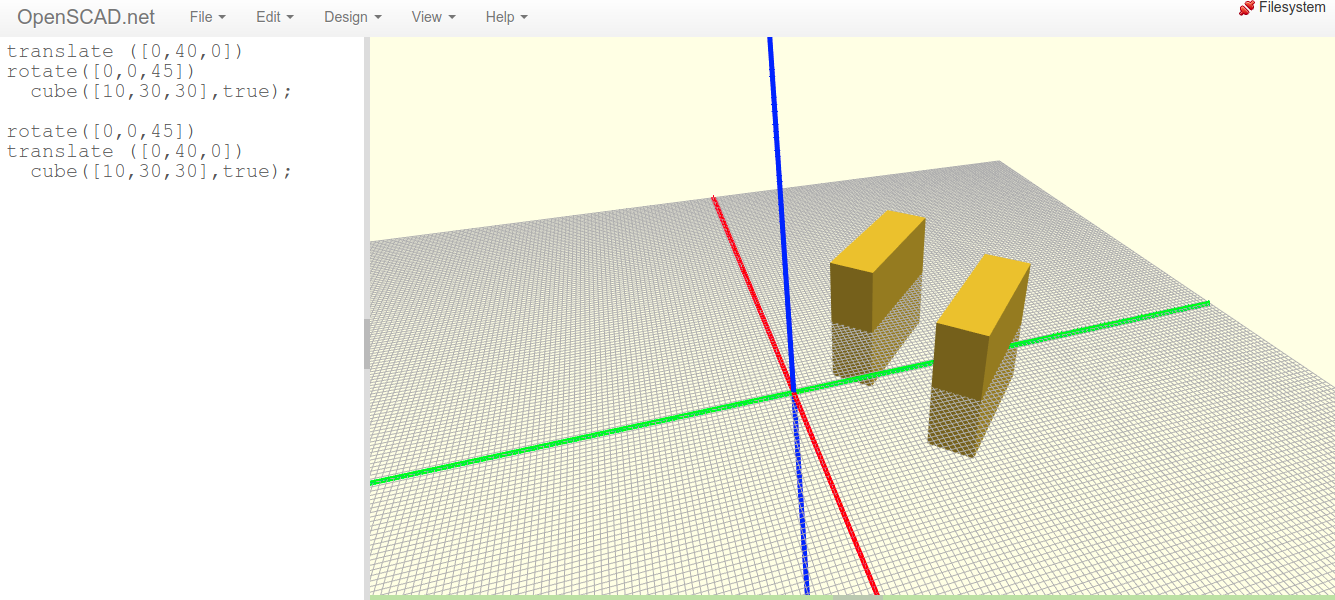
Combinazione di traslazione e rotazione consicutive. Fare attenzione all’ordine in cui si inserisco rotazione e traslazione; viene eseguita per prima la trasformazione più vicina al comando solido con la conseguenza che invertire le operazioni porta a risultati differente come mostrato in figura:
translate ([0,40,0])
rotate([0,0,45])
cube([10,30,30],true);
rotate([0,0,45])
translate ([0,40,0])
cube([10,30,30],true);